Developing an agent using RL (new in 2024)
The SCML game provides a new and interesting challenge for reinforcement learning and multi-agent reinforcement learning research. The main challenges in this game are:
Each world is different which means that a single policy is not likely to work effectively in all worlds. This means that it may be beneficial to train multiple RL agents and design a way to switch between them depending on the situation. This approach was shown to be effective in simple automated negotiations before.
The environment is partially observable because the agent has no access to the state of other agents.
The environment is not deterministic because different penalties and exogenous contracts are sampled from probabilistic distributions and do affect the behavior of all agents in the environment.
The state space is huge. The information available to the agent through the
awidespite being partial is still large enough that just passing everything to the RL training algorithm is not likely to work.Reward is sparce. No rewards of anykind are received - natively - during negotiations. The only rewards received by the agent are changes in its balance calculated at the end of every simulated day.
The SCML game is a realistic game for which any advance can readily be translated into a real-world application. Some of the best peforming agents in past iterations of SCML (OneShot) did use RL in some capacity. It was difficult to develop these agents because no native support was provided. In SCML 2024, we provide native support for developing RL agents both for the OneShot and Standard tracks. This tutorial walks you through the process involved in developing, training, and submitting a simple RL agent for SCML 2024 OneShot. The process is exactly the same for the standard track.
Moving Pieces
RL support in SCML depends on multiple simple components. This section of the tutorial introduces all the moving pieces and describe how they fit together. The overall design is shown in the following figure:
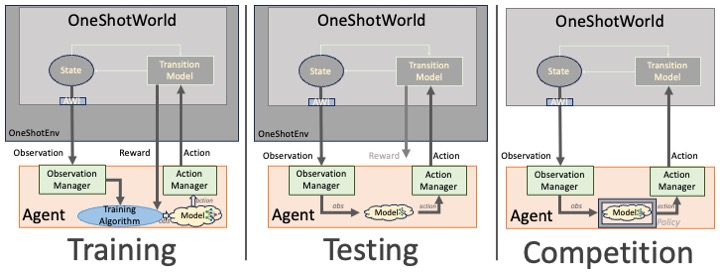
SCML RL Components
The Context
One of the unique features of SCML compared with other RL games is the fact that every SCML simulation is different. For example, a market with two suppliers and a hundred consumers is pretty different from one with a hundred suppliers and two consumers. This makes it unlikely that a single RL agent can achieve high scores in all simulations. Agents that used machine learning in general and RL in particular in SCML 2019 to 2023 tended to train a dedicated model for each set of simulations that were judged to be similar enough for a single model to work well. We support this multi-model approach through the concept of a world context. A Context has two roles in SCML:
It can be used to generate worlds satisfying the constraint(s) defined by that context. For example, a FixedPartnerNumberOneShotContext will always generate oneshot worlds that have the specificed number of suppliers and consumers. This is done by calling the generate method.
It can be used to test whether a given world/api/context satsifies the constraint(s) defined by the context. This is done by calling the is_valid_world/is_valid_awi/contains_context methods or simply using
in. For example (world in context) will beTrueonly ifworldcould have been generated bycontext.
The Environment
As is always the case in RL, we need the following components: An environment which represents the game, an agent (or multiple agents) that that receive observations from the environment and return actions to it, and a reward function which provides feedback to the agent (during training). These directly translate to the components of the RL subsystem of SCML and the environment is what pulls all of this together.
OneShotEnv
is the base environment class. It instantiates OneShotWorlds based
on the given Context. The agent is represented within this
environment with a
Placeholder
which just acts as a placeholder for the RL agent interacting with this
environment. You do not need to modify this placeholder agent or touch
the environment (but you can if you wish to change how the interaction
between it and the agent goes). The environment keeps track of the rest
of the components as well and uses them to interact with the true
OneShotRLAgent developed by the participant. These are the
RewardFunction, ObservactionManger and ActionManager
explained next.
The environment is used <strong>offine</strong> during agent development for training and testing (See the left and middle panels above). In the official competition, worlds are generated directly and no environment is created (right panel above).
During training and testing of the RL model, the environment enacts the following process:
The context is used to generate a world in the beginning of the session and for generating new worlds once the current world simulation is done.
At every step, the environment uses the ObservationManager to encode the current state and pass it to the model being trained or tested.
The model generates actions which are decoded using the ActionManager as offers/counter offers in all negotiations in which the RL agent is involved. These offers are passed back to the world and the simulation is stepped.
At the end of every step, the RewardFunction is used to calculate the appropriate reward to be returned to the training algorithm during training.
Observation Manager
The observation manger is responsible of, well, managing ovbservation by implementing the following functionality:
Creation of the appropriate gymnasium observation space to be used by the model representing the agent strategy. This is implemented by the mak_space method.
Encoding the current state of the environment as seen by the agent into an observation to be passed to the model. This observation must be compatible with the action-space created by this observation manager. This is implemented by the encode method.
The observation manager can optionally implement a get_offers method to extract partner offers from the encoded state. This functionality is not needed by RL agents but it may be helpful for debugging.
As explained in the previous section, the environment mainly uses the ObaservationManager() to encode the state of the world for the consumption of the RL agent. SCML’s full observation of the agent (See awi.state) is extremely large. This means that the ability of the ObservationManager to balance keeping track of useful information and explosion of the state-space size will be an important factor in the success of RL agents in SCML. We suspect this component is where most of the designer effort needs to be spent.
Action Manager
The action manager is responsible of managing the actions flowing from the agent to environment. It must provide the following functionality:
Creation of the appropriate gymnasium action space to be used by the model representing the agent strategy. This is implemented by the mak_space method.
Decoding the action generated by the agent’s model into a mapping of partners to counter-offers/responses. This is implemented by the decode method
Optaionlly, the action manager can also implement encoding of any given response to partners into a model-compatible action in the encode method. This is mostly used for debugging purposes.
Reward Function
During training, the environment needs to generate rewards for the RL policy being trained. This is the responsibility of the RewardFunction. The default reward function simply returns the difference in agent’s balance (money in the wallet) before and after executing its action. This is guaranteed to be zero as long as negotiations are going on and will only be nonzero at the end of every simulation day when profits are calculated by the simulator. You may consider designing a different reward function for your agent. The reward function is called twice in every step of the environment (i.e. every negotiation step):
The
before_actionmethod is called before the agent acts in the environment and is allowed to return arbitrary data.The
__call__method is called after the agent acts in the environment and it receives whatever data returned frombefore_action. This method is responsible of returning a real-valued reward to be passed to the agent.
The Agent
There are two RL-related agent types in SCML:
OneShotRLAgent is the main class responsible for implementing RL agents that can run in the OneShotWorld and compete in the scml-oneshot track.
Placeholder which is used internally by the environment as a place-holder for the RL agent controlled by the
OneShotRLAgent. You should not need to care about this agent type.
The OneShotRLAgent receives lists of models, observation and action
managers and a fall-back agent type. During initialization
(init
call), the agent loops through the observation and action managers
checking whether the current world is compatible with them (i.e. in the
contexts they are compatible with). Once such a match is found, the
corresponding model is selected to act in this world simulation. You can
have this test done only at initialization (default) or every step (see
dynamic_context_switching) and you can use the given order of
observation/action managers or randomize it every check. If no
observation/action manager are found to be compatible with the current
simulation, the fallback_agent_type is used to create a fall-back
agent which takes over in interacting with the simulation.
You do not usually need to change anything about how this agent works but you can modify how it handles multiple contexts/models, use dynamic context switching, randomize model checking order, change the fall-back agent, etc.
Model
An RLModel is what you train for a given context. It takes the
output of the ObservationManager as observations and generates actions
for the ActionManager to pass into the simulation. You can write your
own models by hand but, most likely, you will let an RL training
algorithm train this model offline. You can then use the appropriate
model for each world through the OneShotAgent explained above.
You need to wrap trained models using wrap_model() before using them in OneShotRLAgent.
How to train your dragon (agent)?
The process of developing your own RL agent for the scml competition is straight forward:
You need to decide what contexts will you be using. You can use any contexts in the scml package or design your own.
Create observation and action managers that are compatible with the contexts you decided (if ones are not already available in the scml package).
Train one model per context using the corresponding observation and action manager.
Test your models offline until you are satisfied of their performance.
Design a fallback agent that can be used whenever the world simulation does not match any of the contexts you designer/used.
Create a
OneShotRLAgent(orStdRLAgentfor the standard track) that simply loads the models you trained with their appropriate observation and action managers.Submit your agent to the competition with the saved models.
What can you change?
The moving parts that you control to develop your RL agent for SCML are the following:
Context. You can design your own contexts that represent the environments for which your models are trained. You can use as many contexts and train as many models as you need. We use one context for acting as a supplier and another for acting as a consumer in the code template.
RewardFunction. You can design your own reward function and use it for training one or more of your models. You can use different reward functions for different contexts. We simply use the balance change at the end of the simulated day as the reward in the code template.
ObservationManager. You can design what your agent observes in the environment. The default observation manager currently uses the following data from the AWI:
Received offers to be responded to
Needed sales and supplies
Number of production lines
Agent level (i.e. level 0 or 1)
Relative negotiation time (within the day)
Relative simulation time (day within the simulation)
disposal cost
shortfall penalty
current trading prices of input and output products
ActionManager. You can decide what kinds of actions does your agent generate and how can these be translated into negotiation actions during the competition. The default action manager can be used diretly to negotiate in any simulation.
Training Algorithm. You can change the training algorithm used for your models. You can even have different training algorithms for different models in different contexts. This is all done offline so you are completely free here. We use A2C in the code template.
Model Architecture You can design the neural architecture of your models in any way you like as long as it matches the training algorithm you are using and the observation/action manager they employ. We use a simple MLP architecture in the code template.
Fallback Strategy. If a world does not match any of the contexts you designed, the system will use your fallback-strategy for the simulation represented by this world. You can modify the fallback strategy as well. The default fall-back agent is the GreedyOneShotAgent
Developing an RL agent for SCML
In which we give a full example of developing an RL agent for SCML. You can use the oneshot template or the std template provided by the organizers to simplify this process. The following example is roughly based on these templates.
The first step is to decide the contexts you are going to use for your RL agent. As explained above, an RL agent can use multiple models depending on the context it finds itself in. In this example we use two contexts, one for \(L_0\) agents and another for \(L_1\) agents.
Context Design
The function make_context below can be used to create either of
these contexts:
def make_context(as_supplier: bool):
"""Generates a context for the agent acting as a supplier or as a consumer"""
if as_supplier:
return SupplierContext()
return ConsumerContext()
Observation Manager Design
The second step, is to decide what observations are we going to get from
the environment. This is the responsibility of the
ObservationManager. Here we simply use one of the built-in
observation managers.
The built-in observation manager is just a baseline that is not expected to behave well. Please be sure to design your own observation manager. You can use the code of the built-in observation manager as an example.
Our observation manager is implemented by MyObservationManager in
which we show all the methods that you need to implement for your
observation manager.
from gymnasium import spaces
class MyRewardFunction(DefaultRewardFunction):
def before_action(self, awi: OneShotAWI):
return super().before_action(awi)
def __call__(self, awi: OneShotAWI, action: dict[str, SAOResponse], info) -> float:
return super().__call__(awi, action, info)
class MyObservationManager(FlexibleObservationManager):
"""This is my observation manager implementing encoding and decoding the state used by the RL algorithm"""
def make_space(self) -> spaces.Space:
"""Creates the observation space"""
return super().make_space()
def encode(self, state: OneShotState) -> np.ndarray:
"""Encodes an observation from the agent's state"""
return super().encode(state)
def make_first_observation(self, awi: OneShotAWI) -> np.ndarray:
"""Creates the initial observation (returned from gym's reset())"""
return super().make_first_observation(awi)
def get_offers(
self, awi: OneShotAWI, encoded: np.ndarray
) -> dict[str, SAOResponse]:
"""Gets the offers from an encoded state"""
return super().get_offers(awi, encoded)
Training
Now that we have a way to observe the environment, we can train two
models for our two contexts. train_models() below achieves this by
simply creating an environment for each context, instantiate an A2C
trainer (from the stable_baselines3 library) and calls its learn()
method to train the model. The two learned models are then returned.
from stable_baselines3 import A2C
from scml.oneshot.rl.action import FlexibleActionManager
from scml.oneshot.rl.agent import OneShotRLAgent
from scml.oneshot.rl.env import OneShotEnv
def train_models(n_training=100):
def make_env(supplier) -> OneShotEnv:
context = make_context(supplier)
return OneShotEnv(
context=context,
action_manager=FlexibleActionManager(context=context),
observation_manager=MyObservationManager(context=context),
reward_function=MyRewardFunction(),
)
models = []
for as_supplier in (False, True):
suffix = "supplier" if as_supplier else "consumer"
print(f"Training as {suffix}")
# create a gymnasium environment for training
env = make_env(as_supplier)
# choose a training algorithm
model = A2C("MlpPolicy", env, verbose=0)
# train the model
model.learn(total_timesteps=n_training, progress_bar=False)
print(f"\tFinished training the model for {n_training} steps")
models.append(model)
return models
We can now train our models
trained_models = train_models()
Training as consumer
Finished training the model for 100 steps
Training as supplier
Finished training the model for 100 steps
Creating the Agent
The final step is to create our agent class MyAgent. This class
simply inherits from the OneShotRLAgent class and updates the
initialization paratmers to use the models we just trained. Note that
each model should be wrapped in a Policy object which is done by the
model_wrapper method below. Also note that we use pass our
observation manager to the base OneShotRLAgent alongside the model.
It is possible to use different observation managers for differnt models.
Make sure that the context used to train the model is the same as the one used for the observation manager.
from scml.oneshot.rl.common import model_wrapper
class MyAgent(OneShotRLAgent):
def __init__(self, *args, trained_models=trained_models, **kwargs):
# update keyword arguments
kwargs.update(
dict(
# load models from MODEL_PATH
models=tuple(model_wrapper(_) for _ in trained_models),
# create corresponding observation managers
observation_managers=(
MyObservationManager(context=SupplierContext()),
MyObservationManager(context=ConsumerContext()),
),
action_managers=(
FlexibleActionManager(context=SupplierContext()),
FlexibleActionManager(context=ConsumerContext()),
),
)
)
# Initialize the base OneShotRLAgent with model paths and observation managers.
super().__init__(*args, **kwargs)
Now we have an agent that can be tested as we did in the previous tutorial:
worlds = []
for _ in range(6):
world, _ = ANACOneShotContext(placeholder_types=(MyAgent,)).generate()
worlds.append(world)
world.run()
SCML2024OneShotWorld.plot_combined_stats(worlds, pertype=True, perishable=True)
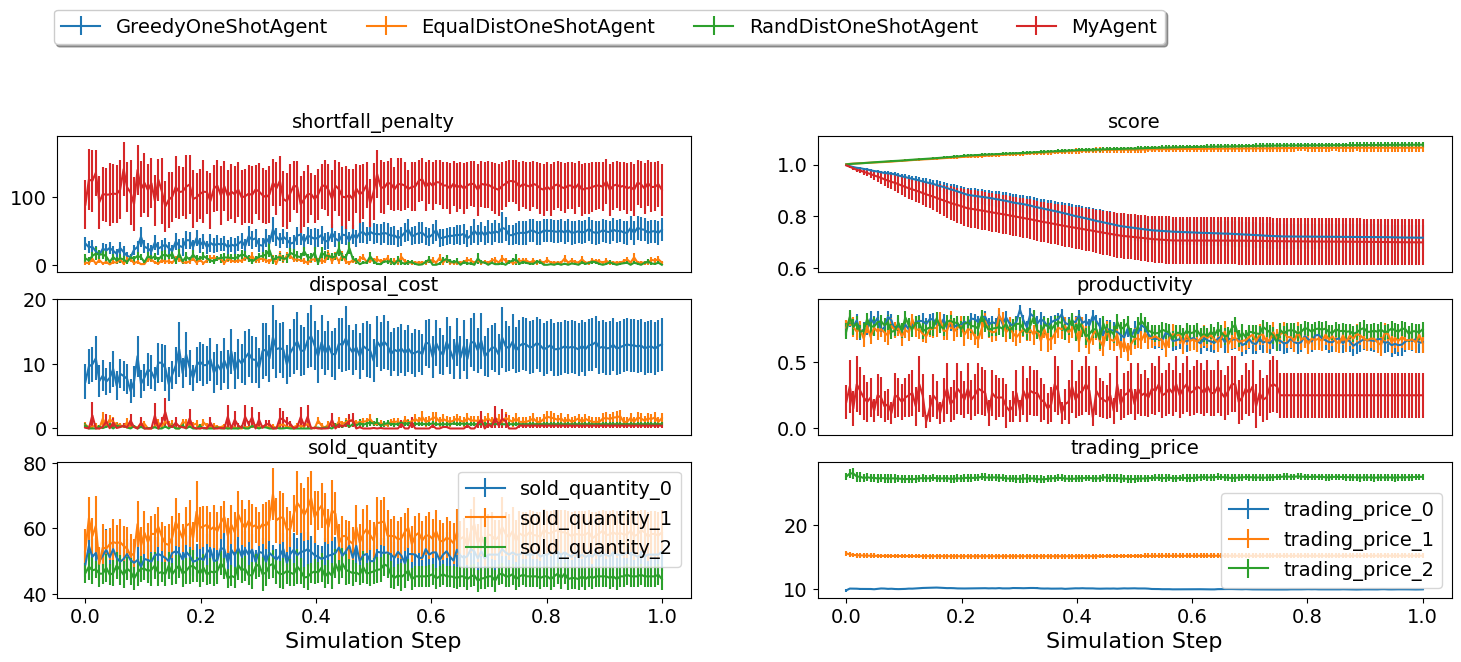
As we should have expected, given the few training steps we used and the use of basic observation and action manager and the default sparse reward function, the agent did not behave very well.
Saving and Loading
So far, we trained our models and saved them in a global variable
trained_models that we passed directly to our agent on construction.
To submit to the ANAC SCML OneShot, you
need to submit the trained models with your agent. You can download a
template that does that for you
here.
In this section, we show a simple way to get this done that does not
depend on this template.
Firstly, we need to save the models to some known location:
from pathlib import Path
MODEL_PATH = Path.cwd() / "models"
def save_models(models, path: Path = MODEL_PATH):
# save the models
path.mkdir(exist_ok=True, parents=True)
for i, model in enumerate(models):
model.save(path / f"{i}model")
return path
def load_models(models, n=2, path=MODEL_PATH):
# load the models
return [A2C.load(path / f"{i}model") for i in range(n)]
Let’s try our saver and loader:
new_models = load_models(save_models(trained_models), len(trained_models))
At least no errors :-) Now let’s try our new models. We defined
MyNewAgent to simply load the models from our predefined path and
pass them to our MyAgent:
class MyNewAgent(MyAgent):
def __init__(self, *args, path=MODEL_PATH, **kwargs):
super().__init__(*args, trained_models=load_models(path, 2), **kwargs)
We can now test the new version:
worlds = []
for _ in range(6):
world, _ = ANACOneShotContext(placeholder_types=(MyNewAgent,)).generate()
worlds.append(world)
world.run()
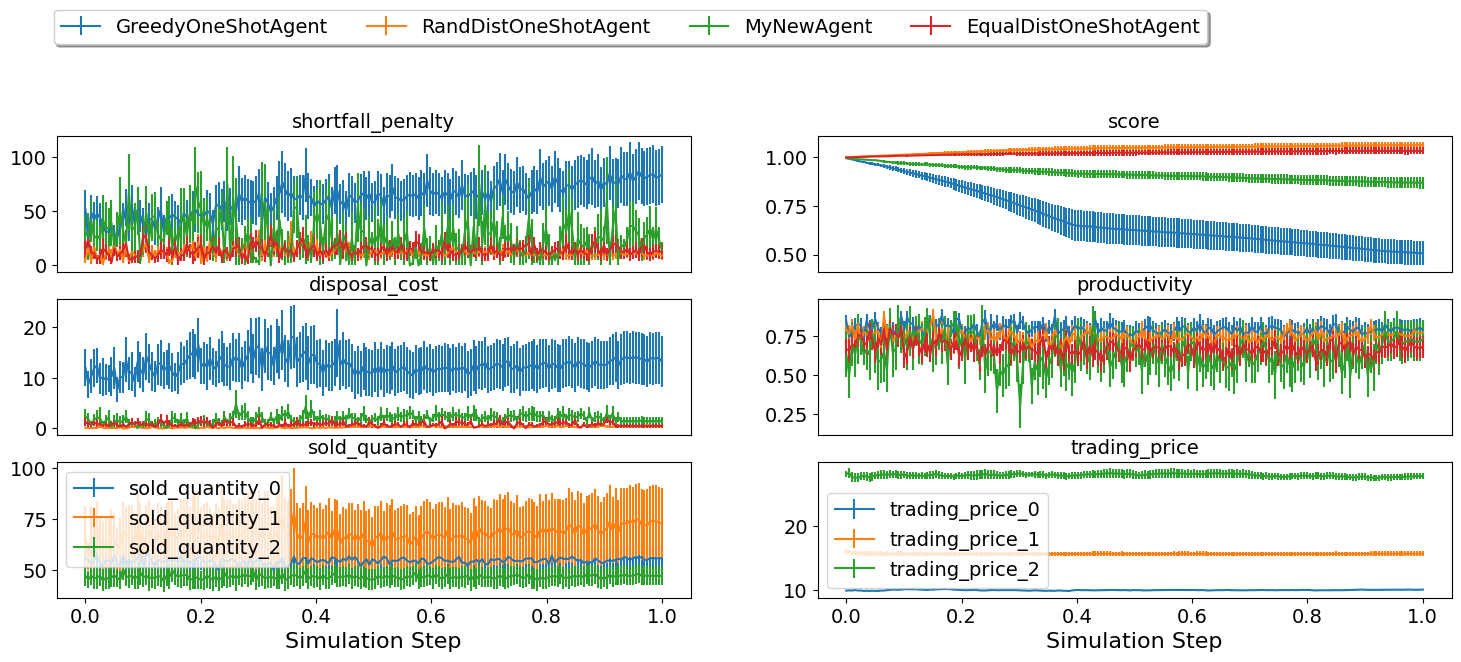
SCML2024OneShotWorld.plot_combined_stats(worlds, pertype=True, perishable=True)
What next?
As expected, the trained model is too weak for several reasons:
We trained it for only few steps (not even a complete world simulation). You will want to increase the number of steps during training.
The contexts we used are too general. A supplier with one other competitor and ten consumers is in a situation that is very different than one with ten other competitors and two consumers. You may need to think more carefully about what contexts makes sense for this problem.
The observation manager just does not make much sense. The built-in observation manager keeps track of the offers received and just few other parameters from the environment. This is not enough most likely to train a strong agent. Maybe, most of your time will be spent trying to come up with good observation managers.
The reward function received by the agent during training is simply the profit/loss accrued every day. This is too sparse as there is no signal during negotiations. You may consider doing reward shaping by creating a reward function and passing it to the environment used in training.
A note about SCML Standard
This tutorial used the scml-oneshot simulation to show how to develop an RL agent. The same process works once you change every mention of OneShot with Std in the explanation above for the scml-std game. Be aware though that the standard track of SCML does not restrict the number of production levels to two as in the oneshot track. This means that the agent may find itself in the middle of the production graph negotiating on both sides for supplies and sales. This means that using two contexts one when we are in the first production level and another when we are in the last is not going to be enough for scml-std and we need at least a third context in which the agent is in the middle of the production graph.
Download Notebook.